To make KLT tracking more robust with respect those changes due to
illumination, we modify the KLT warping model to:
\[I(x) = e^α I(x + b) + β\]
where \(α\) and \(β\) are two additional scalar coefficients
accounting for changes in image contrast and image brightness
respectively. However, for fear of expanding the size of the Jacobian
iteration matrix (4×4 instead of 2×2), an image normalization step is
adopted before updating the set of tracking coefficients \(b\)1. This normalization step
consists of scaling (by \(λ\)) and
translating (by \(δ\)) the current
warped image \(J\) so that the
reference warped image \(I\) and the
current warped image \(J\) have same
mean brightness and variance.
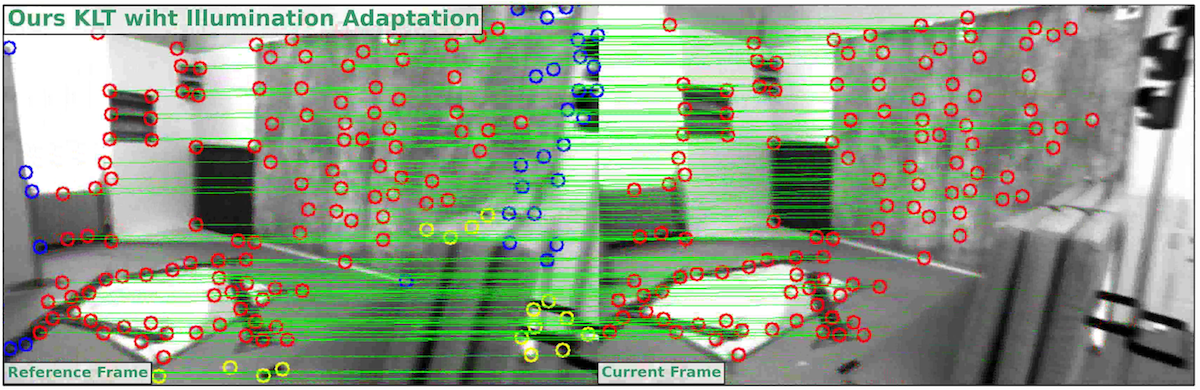
The figure below shows the tracking results where the the blue
circles represent the detected keypoints by goodFeaturesToTrack, yellow
circles represent the tracked keypoints by KLT and red circles represent
the tracked keypoints after removing the outliers by findHomography or
findFundamentalMat (Blue circles \(⊇\)
Yellow circles \(⊇\) Red circels).
We define the tracking rate = number of tracked keypoints / number of
detected keypoints.
klt with il
Static Verification
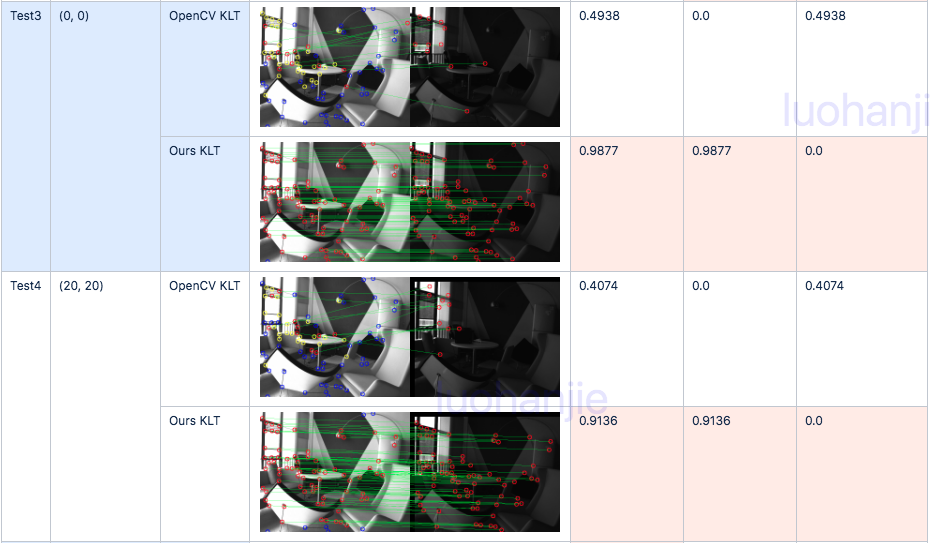
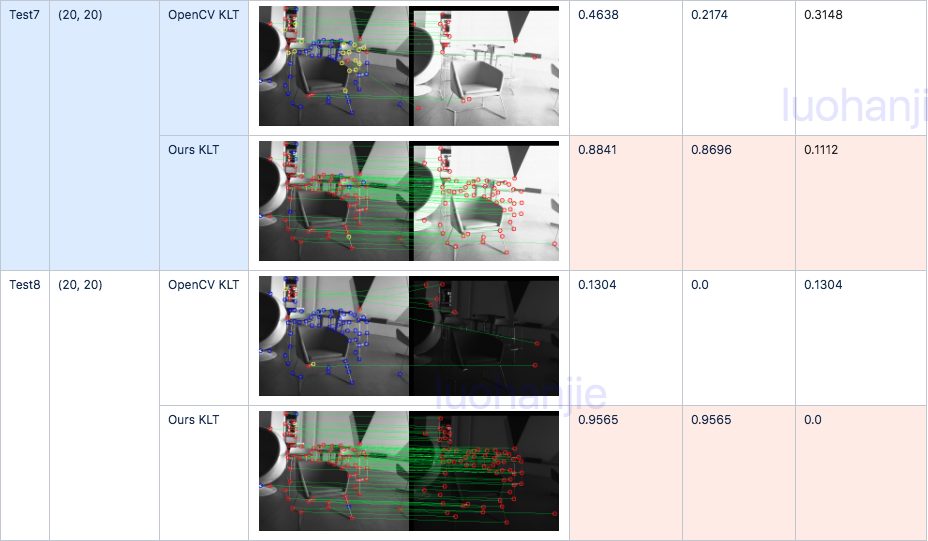
The experiments below verify that our method extremely enhance the
KLT tracking performance in spite of the illumination changes.
Noteworthily, although original KLT has higher tracking rate without
outlier removal in some experiments (Test2, Test5), it has a lower
tracking rate after outlier removing, which means the result of original
KLT contains numbers of false matching pairs. The false positive rate
proves this.
Dynamic Verification
Evaluation Part 1
The new KLT is evaluated in the EuRoC V1_03_difficult Dataset2, which is the most challenging
dataset with aggressive motion and great illumination change. We take
the current image as reference frame and the next image as the current
frame.
Result
Evaluation Part 1
Evaluation Part 2
A more challenging experiment, which takes the current image as
reference frame and the next third image as the current frame, will be
conducted.
Result
Evaluation Part 2
It manifests the original KLT significantly outperforms our method.
One probable reason is that the initial tracking position is too far to
the tracked point in this experiment, convergence problem could arise
for a more complex warping model. However, there are more outliers using
the OpenCV KLT while the false positive rate is low using ours KLT.
Bouguet, Jean-Yves. "Pyramidal implementation of the
affine lucas kanade feature tracker description of the algorithm." Intel
Corporation 5.1-10 (2001): 4.↩︎
Hanjie Luo School of Electronic and Computer Science
University of Southampton 6 February, 2011
Introduction
The basic rules of
evolutionary games
Evolution of cooperative behaviour is widely existent in the
biological organisms and social systems. In order to research the
evolution of cooperation, some classical evolutionary games have been
used, and Prisoners’ Dilemma (PD) is one of the famous models.
In this paper, I use a simplified version of Prisoners Dilemma which
is played by two kinds of plays: those who always apply cooperation
strategy, C, and those who always apply defection strategy, D, on a
two-dimensional, n×n lattice with fixed boundary conditions. Each
position is only occupied by a C or a D. The payoff matrix which
describes the interaction is as follows:
1 2 3
C D C 1 0 D b 0
where, b is the only parameter which represents the advantage for
defectors. In each generation of the game, each site-owner receives a
score which is the sum of the pay-offs with 8 immediate neighbours and
itself. In the next generation, each lattice-site is replaced by the
highest-scoring player among 8 immediate neighbours and itself. I also
explored the game played with only 8 immediate neighbours without
self-interaction and 4 orthogonal neighbours with self-interaction.
Consequently, different chaotically changing patterns can be
generated by setting different initial condition and different regimes
of parameter b. Nowak and May observed that \(2>b>1.8\) is the most significant
regime where C and D both will grow which makes the frequency of
cooperators always reaches approximately 0.318 regardless of initial
conditions (1992: 826).
As an extension, I study the evolutionary game in three-dimensional
space and predict that it has the same performance as the game in
two-dimensional space.
Reimplemented Results
8-neighbours with
self-interaction
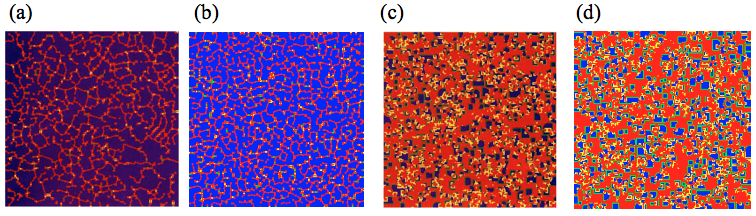
Figure 1 shows two different asymptotic patterns which are generated
by PD for two different magnitude ob b. for \(1.75<b<1.8\), D clusters will shrink
while C will continue to grow. In this situation, figure 1a and 1b show
that some D line fragments exist on the background of C. Figure 1c and
1d are for the significant regime \(1.8<b<2\) where C and D both persist
in expending thereby creating the chaotic dynamic patterns. However,
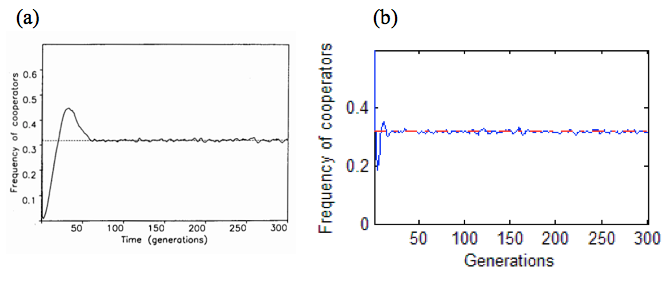
figure 2 shows that the frequency of cooperators \({f_c}\) is completely independent of all
the starting conditions, which is around \(12\log 2 - 8 = 0.318\) (Nowak and May 1992:
826). It seems that there is a universal constant hiding in the PD.
Simulations of evolutionary games in
space 1
Figure 1. These figures are the patterns which are generated by
Prisoners’ Dilemma for different magnitude of b. (a) and (c) are the
original pictures from paper while (b) and (d) are reimplemented
figures. All simulations start with the initial condition with 10%
defectors at a 200×200 square-lattice with fixed boundary conditions.
The figures show the generation \(t>100\). The colour coding is as
follows: blue, a C site which was a C in the previous generation; red, a
D site which was D; yellow, a D following a C; green, a C following a D.
(a) and (b) are the patterns when \(1.75<b<1.8\) whereas (c) and (d) are
the patterns when \(1.8<b<2\).
(Nowak and May 1992: 827)
Simulations of evolutionary games in
space 2
Figure 2. The frequency of cooperators with random initial
conditions. (a) is the original figure from paper while (b) is
reimplemented figure. The dashed or red line represents \({f_c=0.318}\). Conditions: 400×400 square
lattice with fixed boundaries conditions, 8 neighbours plus
self-interaction, \({f_c(0)=0.6}\),
\(1.8<b<2\), 300 generations.
(Nowak and May 1992: 827)
8-neighbours without
self-interaction
A similar result was obtained by excluding self-interaction. However,
there is a small different on the regimes of b values. The C clusters
will continue to grow when \(b<5/3\)
while D clusters will keep growing when \(b>8/5\). As a result, the most
significant region is \(8/5<b<5/3\) where both C and D will
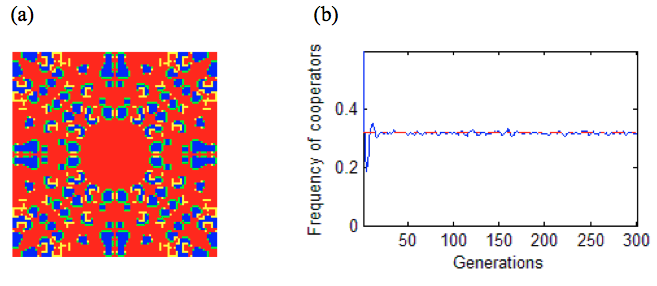
continue to grow (Nowak and May 1992: 57). Figure 3a shows a symmetric
pattern which starts from a single D at the centre of Cs. Figure 3b
reveals that the frequency will converge to around 0.300 for random
starting conditions, which is slight different from figure 2.
Simulations of evolutionary games in
space 3
Figure 3. (a) The symmetric pattern generated by the
evolutionary games. It begins with a single D at the centre of a 99×99
square lattice of Cs with fixed boundary conditions. Other conditions:
8-neighbours without self-interaction, \(8/5<b<5/3\), generations=218. (b) The
frequency of cooperators for a 400×400 square lattice with fixed
boundaries conditions, random initial conditions (10% defectors), \(8/5<b<5/3\), generations=300. The red
line represents 0.300.
4-neighbours with
self-interaction
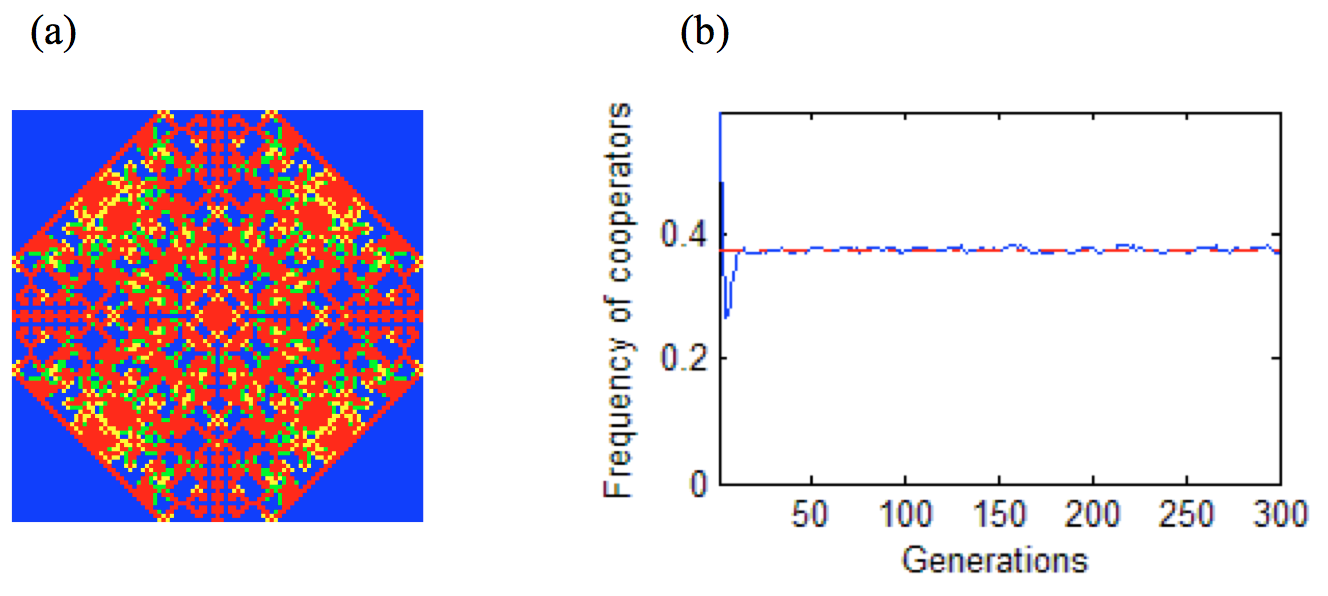
The game played with 4 orthogonal neighbours plus self-interaction is
also explored. The interesting regime has become \(5/3<b<2\) (Nowak and May 1992: 829).
Figure 4a shows a different complex pattern contrasting with figure 3a.
Similarly, figure 4b manifests that the frequency will converge to
around 0.376 for random starting conditions.
By observing through figure 2, figure 3b and figure 4b, the frequency
of cooperators always converge to a specific proportion. So, it seems
that the results of the evolutionary games have some kind of
robustness.
Simulations of evolutionary games in
space 4
Figure 4. (a) The symmetric pattern of a square-lattice with 4
neighbours plus self-interaction which begins with a single D at the
centre of a 99×99 square lattice of Cs with fixed boundary conditions,
\(5/3<b<2\), generations=218. (b)
The frequency of cooperators for a 400×400 square lattice with fixed
boundaries conditions, random initial conditions (10% defectors), \(5/3<b<2\), generations=300. The red
line represents 0.376.
Extensions
Evolutionary games in
three dimensions
Introduction
The evolutionary games above are all played in two dimensions. So, it
is interesting to study the evolutionary games in three dimensions and
see what difference it makes contrasting to the games in two
dimensions.
The basic rules are almost the same as two-dimensionl versions except
the players are placed on an n×n×n cubic world. The interaction of the
games is with the 26 immediate neighbours plus self-interaction.
The purpose of PD is to simulate the cooperate behaviors among
biological organisms and social systems in the real world. However, the
world we lived in is three-dimensional. Consequently, it is necessary to
simulate in three dimensions for reaching valid results about real
world. It is reasonable to forecast that the results of the games in
three dimensions are very similar to the games in two dimensions which
can also generate the symmetric patterns and the frequency will converge
to a specified value because these results are widely seen in the games
in two dimensions.
Results of extension
By experiment, I find that if \(b>1.421\), a 2×2×2 cube of D will keep
growing at the corners while a 2×2×2 cube of C will keep expanding if
\(b<2\). So the interesting regime
has become \(1.421<b<2\) where
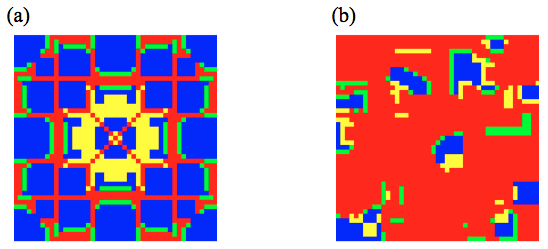
both C and D will keep growing. Figure 5 shows different patterns for
two different regimes of b values which both started with a single D at
the centre Cs. For \(1.421<b<1.5\), I find symmetric
patterns emerged while the patterns have become chaotic if \(1.5<b<2\), which is slight different
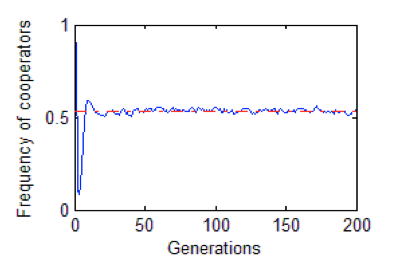
from games played in two dimensions. Figure 6 shows that the frequency
will converge to around 0.535 for all random starting conditions.
Simulations of evolutionary games in
space 5
Figure 5. The patterns generated by PD in three dimensions. The
games are played in a 45×45×45 cube with fixed boundary conditions. The
interaction of the games is with the 26 immediate neighbours plus
self-interaction. Both figures show a middle slice, 150 generations
after having started with a single D at the centre Cs. (a) \(1.421<b<1.5\) (b) \(1.5<b<2\).
Simulations of evolutionary games in
space 6
Figure 6. The frequency of cooperators for a 45×45×45 cube with
fixed boundaries conditions, random initial conditions (10% defectors),
\(1.421<b<2\), generations=200.
The interaction of the games is with the 26 immediate neighbours plus
self-interaction. The red line represents 0.535.
Conclusion
The results of simulations reveal that the PD in three dimensions has
the same characteristics as the PD in two dimensions. As a result, we
can use PD in two dimensions, which is less computing contrasting with
PD in three dimensions, for simulating this three-dimensional real
world.
Evolutionary
games with asynchronous updating
Introduction
The rule described above means that all players are updated their
states at the same time. However, a global clock which synchronizes
their interactions is non-existent in a natural system. Consequently, it
is necessary to update the states continuously and asynchronously for
simulating a real world system (Huberman and Glance 1993: 7717).
In order to realize asynchronous updating, a small enough interval of
time, which makes at most one site-owner interactions within that time
interval, is randomly chosen. The chosen site-owner interactions with
its neighoubers (with or without self-interaction) and replaces its
state immediately while other states of site-owners stay constant.
Consequently, the environment of the world will be changed slightly and
continuously at each time interval. This procedure will continue until
all entities have been chosen once.
Results of extension
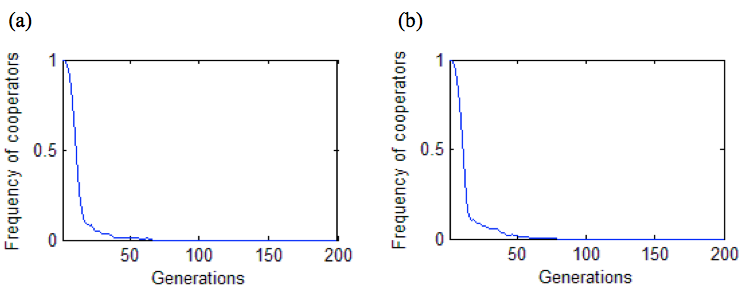
Figure 8 shows that a synchronously updated games starts with a
single D at the centre of Cs. The array will be eventually full of Ds
within 100 generations, which is quite different contrasting with the
synchronous version.
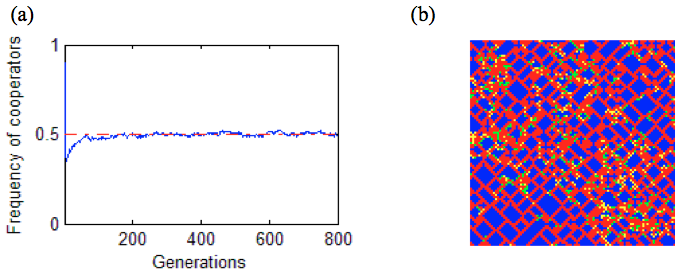
However, the situations are quite different when the interaction is
with 4 neighbours plus interaction. Figure 9a reveals that the frequency
will converge to around 0.500 for random starting conditions (including
a single D at the centre of Cs). Figures 9b shows a similar pattern
comparing with figure 1a.
Simulations of evolutionary games in
space 7
Figure 8. The frequency of cooperators with asynchronous
updating. The games begin with a single D at the centre of a 99×99
square lattice of Cs with fixed boundary conditions. (a) Conditions: 8
neighbours plus self-interaction, \(1.8<b<2\). (b) Conditions: 8
neighbours exclude self-interaction, \(8/5<b<5/3\).
Simulations of evolutionary games in
space 8
Figure 9. The results of PD with asynchronous updating. The
games play at a 99×99 square lattice with fixed boundaries conditions,
random initial conditions (10% defectors), \(5/3<B<2\), generations=800. (a) The
frequency of cooperators. The red line represents 0.500. (b) The 800th
generation of patterns.
Conclusion
The experiments show that, in an asynchronously updated game, the
array will always be full of Ds as long as a C in the initial conditions
when the interaction is with 8 neighbours with or without
self-interaction. What’s more, I also find the frequency of cooperators
always converge to a specific proportion if the interaction is with 4
neighbours plus self-interaction, which is the same characteristic
occurring in synchronous version.
Nowak, M, A and May, R, M 1992, ‘Evolutionary games and spatial
chaos’, Nature, vol. 359, pp. 826-829.
Nowak, M, A and May, R, M 1993, ‘THE SPATIAL DILEMMAS OF
EVOLUTION’, International Journal of Bifurcation and Chaos, vol. 3,
no.1, pp. 35-78.
Huberman, B, A, and Glance, N, S, 1993, ‘Evolutionary games and
computer simulations’, Proceedings of the National Academy of Sciences,
vol. 90, no. 16, pp. 7716-7718.