本文主要参考博客Unity3D 与 Python 的
Socket 通信简单指南 。
Unity3D Client端
Unity3D新建一个Project,Window - Asset Store,搜索Socket.IO for Unity进行安装。Import成功后,Project目录Assets中会出现SocketIO文档。
Project目录中选择Assets - SoketIO - Prefabs,将该目录下的SocketIO拖入到场景中,如下图所示:
检查场景中SocketIO的Url属性:
1 ws://127.0.0.1:4567/socket.io/?EIO=4&transport=websocket
在SampleScene栏目中右键,Create Empty建立一个空白的Object,命名为TestSocket。选择TestSocket,在Inspector窗口中点击Add Component - New script,命名为TestSocketScript,双击脚本进行编辑:
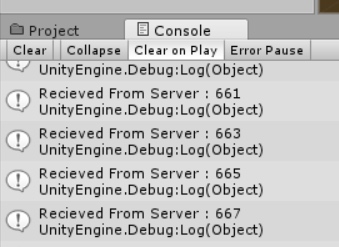
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 using System.Collections.Generic; using UnityEngine; using SocketIO; public class TestSocketScript : MonoBehaviour { // 在 Editor 里把 SocketIO 拖过来 public SocketIOComponent sio; void Start() { if (sio == null) Debug.LogError("Drop a SocketIOComponent to Me!"); // 声明 connect 事件和 server_sent 事件的回调函数 sio.On("connect", OnConnect); sio.On("server_sent", OnReceive); } /// <summary> /// connect 事件的回调函数 /// </summary> /// <param name="obj"></param> void OnConnect(SocketIOEvent obj) { Debug.Log("Connection Open"); OnReceive(obj); } /// <summary> /// 接收到 server_sent 事件的回调函数 /// </summary> /// <param name="obj">SocketIOEvent</param> void OnReceive(SocketIOEvent obj) { // 1. 接收并输出 Server 传递过来的数字 JSONObject jsonObject = obj.data; string rcv_nbr = jsonObject.GetField("nbr").str; Debug.Log("Recieved From Server : " + rcv_nbr); // 2. 将数字 +1 并返回给 Server try { int int_nbr = int.Parse(rcv_nbr); SendToServer(int_nbr + 1); } catch { } } /// <summary> /// 将数字发给 Server /// </summary> /// <param name="_nbr">发送的数字</param> void SendToServer(int _nbr) { Dictionary<string, string> data = new Dictionary<string, string>(); data["nbr"] = _nbr.ToString(); sio.Emit("client_sent", new JSONObject(data)); } }
此时Inspector窗口的Test Socket Script(Script)中会新增一个Sio属性:
sio1
将SampleScene栏目的SocketIO拖动到Sio属性里:
sio2
Python版Server端
1 2 3 sudo pip2 install python-socketio sudo pip2 install eventlet sudo pip2 install Flask
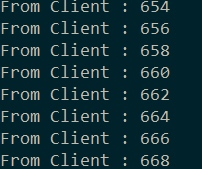
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 import socketio import eventlet import eventlet.wsgi from flask import Flask sio = socketio.Server() app = Flask(__name__) # "连接建立的回调函数" @sio.on('connect') def on_connect(sid, environ): print("connect ", sid) send_to_client(101) # "接收 Client 事件 (client_sent) 的回调函数" @sio.on('client_sent') def on_revieve(sid, data): if data: print ('From Client : %s' % data['nbr']) send_to_client(int(data['nbr']) + 1) else: print ('Recieved Empty Data!') # "向 Client 发送数字" def send_to_client(_nbr): sio.emit( 'server_sent', data = {'nbr':_nbr.__str__()}, skip_sid=True) if __name__ == '__main__': app = socketio.Middleware(sio, app) eventlet.wsgi.server(eventlet.listen(('', 4567)), app)
先运行Python程序,再运行Unity3D场景: