SCARA型机械臂工作区域边界计算方法
罗汉杰. 一种机械臂的轨迹规划方法及装置:中国,201610452034[P/OL]. 2016-11-23 [2018-03-20]. https://patentimages.storage.googleapis.com/8a/5f/bc/325d10a3dee6fc/CN106041941A.pdf
SCARA(Selective Compliant Articulated Robot for Assembly)型机械臂是机械臂的一种。它拥有4个关节(图.1),其中\(J_1\),\(J_2\),\(J_4\)为转动关节,\(J_3\)为滑动关节。
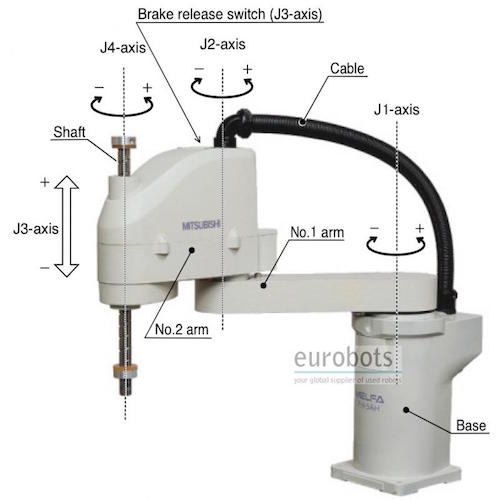
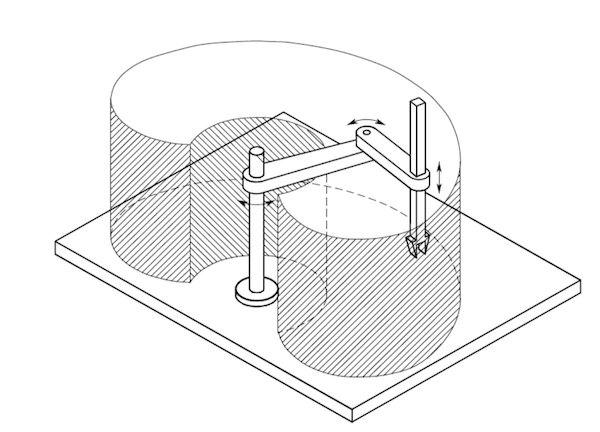
图.2显示了机械臂的工作空间。在机械臂工作的过程中,很多任务需要知道机械臂可到达的边缘位置,比如在示教功能中,用户通过手持设备发送指令,使得机械臂一直沿某个方向直线运动,直至到达到工作区域的边缘时,速度和加速度将降为零。
传统的方法中,可以通过不断监测当前机械臂的是否已经是到达极限位置来实现。但是这种方法需要对路径上所有的位置点进行检测,效率低,计算量大。
在本文中,我们提出了一种基于几何的方法来确定SCARA型机械臂工作区域边缘的方法。给定起始点和方向后,能给出与该射线相交的最近的工作区域边缘位置。利用该方法,在机器人运动前就可以提前知道终点的位置,方便机器人进行运动学规划。
数学模型
我们按照图.3所示对SCARA型机械臂进行DH(Denavit-Hartenberg)坐标系分配。其中转动关节\(J_i\)的转动轴与各自的\(z_i\)轴互相平衡,臂长为\(\alpha _i\),\(\lbrace i\mid i \in \lbrace 1,2,4 \rbrace \rbrace\);滑动关节\(J_3\)的轴跟\(J_4\)的轴平行。
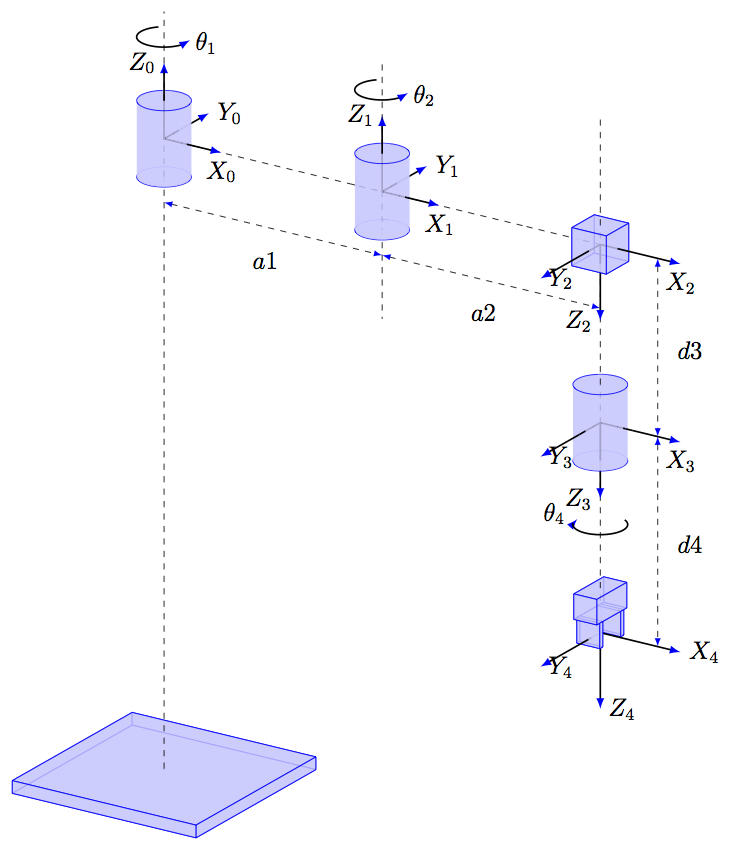
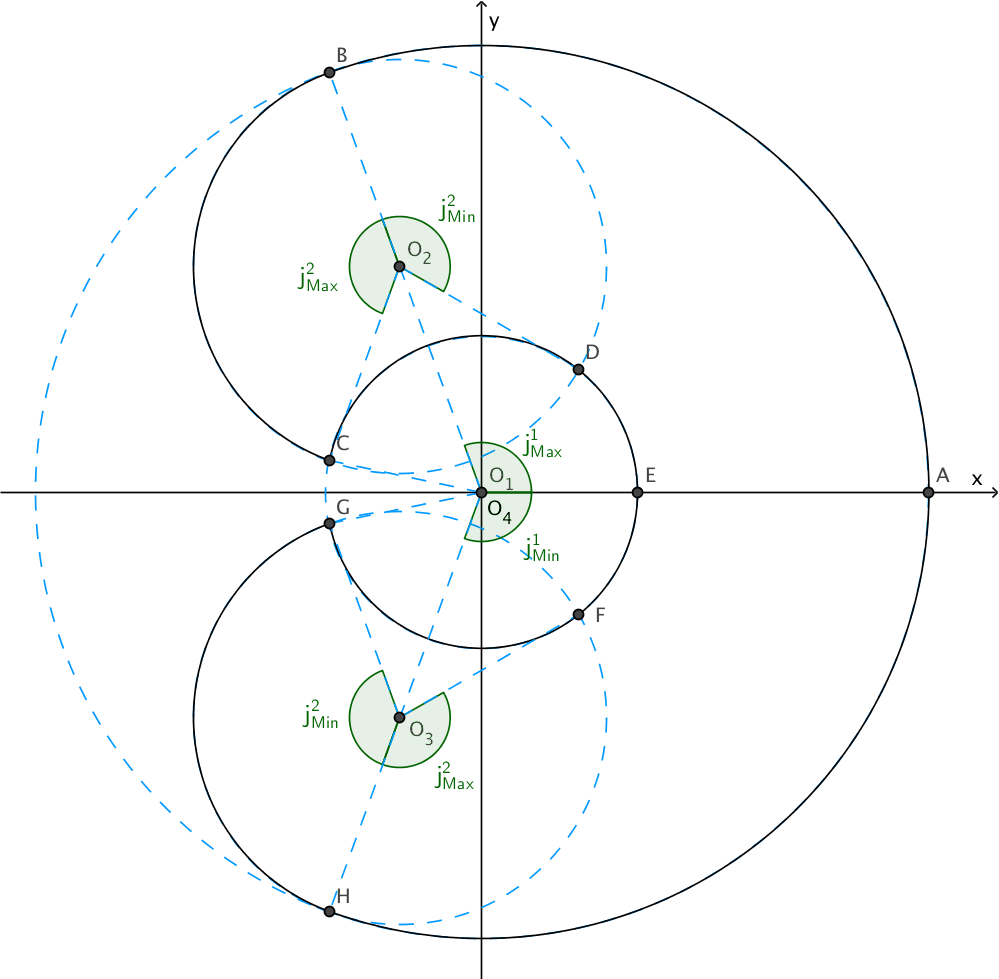
图.3显示了SCARA型机械臂工作区域的俯视几何图。由图可知,机械臂工作区域边界是由\(\overparen{HAB}\),\(\overparen{BC}\),\(\overparen{CEG}\),\(\overparen{GH}\)四段圆弧所围成的。而圆弧分别位于\(\odot{O_1}\),\(\odot{O_2}\),\(\odot{O_3}\),\(\odot{O_4}\)四个圆上。圆心\(O_1\),\(O_4\)与\(J_1\)轴重合;\(O_2\)和\(O_3\)分别为\(J_1\)轴到转动到正负极限时\(J_2\)轴的位置。\(j_{Max}^i\)和\(j_{Min}^i\)分别是电机轴\(J_i\)的正/负方向的最大活动范围,\(j_{Min}^i \le j_{Max}^i\),\(\lbrace j^i \mid - \pi \le j^i \le \pi \rbrace\)。
由几何关系,我们可以得到:
| 圆弧 | 所在圆 | 圆心\((x_{O_i},y_{O_i})\) | 半径\(r_i\) | \(\theta _{Min}^i\) | \(\theta _{Max}^i\) |
|---|---|---|---|---|---|
| \(\overparen{HAB}\) | \(\odot{O_1}\) | \({[0,0]}^{^\mathrm{T}}\) | \(\alpha _1 + \alpha _2\) | \(j_{Min}^1\) | \(j_{Max}^1\) |
| \(\overparen{BC}\) | \(\odot{O_2}\) | \({[\alpha _1\cos(\theta _{Max}^1), \alpha _1\sin(\theta _{Max}^1)]}^{^\mathrm{T}}\) | \(\alpha _2\) | \(0\) | \(j_{Max}^2\) |
| \(\overparen{CEG}\) | \(\odot{O_3}\) | \({[\alpha _1\cos(\theta _{Min}^1), \alpha _1\sin(\theta _{Min}^1)]}^{^\mathrm{T}}\) | \(\alpha _2\) | \(j_{Min}^2\) | \(0\) |
| \(\overparen{GH}\) | \(\odot{O_4}\) | \({[0,0]}^{^\mathrm{T}}\) | \(\left\lvert \overrightarrow {CO_4} \right\rvert\) | \(\theta _{Min}^4\) | \(\theta _{Max}^4\) |
其中:
\[\begin{aligned} \overrightarrow {CO_4} &= \left[ {\begin{array}{*{20}{c}} {\alpha _2\cos \theta _{Max}^2\cos \theta _{Max}^1 - \alpha _2\sin \theta _{Max}^2\sin \theta _{Max}^1 + \alpha _1\cos \theta _{Max}^1} \newline {\alpha _2\cos \theta _{Max}^2\sin \theta _{Max}^1 + \alpha _2\sin \theta _{Max}^2\cos \theta _{Max}^1 + \alpha _1\sin \theta _{Max}^1} \end{array}} \right] \newline &= \left[ {f_x}(\theta _{Max}^1,\theta _{Max}^2), {f_y}(\theta _{Max}^1,\theta _{Max}^2) \right]^{^\mathrm{T}} \newline \newline \theta _{Max}^4 &= \arctan({f_y}(\theta _{Max}^1,\theta _{Max}^2), {f_x}(\theta _{Max}^1,\theta _{Max}^2)) \newline \newline \theta _{Min}^4 &= \arctan({f_y}(\theta _{Min}^1,\theta _{Min}^2), {f_x}(\theta _{Min}^1,\theta _{Min}^2)) \end{aligned}\]
假设点\(s(x,y)\)是圆\(\odot{O_i}\)边上的一个点,则点\(s\)相对于圆\(\odot{O_i}\)的弧度\(\theta ^i\)为:
\[\begin{equation} \label{SCARA_range_e1} \theta ^i = \begin{cases} \arctan(y, x), & \text{if i=1} \newline \arctan( - x\sin \theta _{Max}^1 + y\cos \theta _{Max}^1,x\cos \theta _{Max}^1 + y\sin \theta _{Max}^1), & \text{if i=2} \newline \arctan( - x\sin \theta _{Min}^1 + y\cos \theta _{Min}^1,x\cos \theta _{Min}^1 + y\sin \theta _{Min}^1), & \text{if i=3} \newline \arctan(y, x), & \text{if i=4} \end{cases} \end{equation}\]
我们假设有射线\(R(u)=I+u \cdot \lVert \mathbf{n} \rVert\),起点为\(I\),方向向量为\(\mathbf{n}\),\(\lVert \mathbf{n} \rVert\)为方向向量\(\mathbf{n}\)的单位向量。如果起点在工作区域内,则射线必与某圆\(\odot{O_i}\)有交点\(\kappa _j^{i}\),\(\kappa ^i\)为射线与圆\(\odot{O_i}\)的所有交点。\(\xi = \lbrace \kappa ^i \rbrace\),\(\xi\)为所有交点的集合。
图.5显示了其中的一种情况,射线\(IP\)分别与圆\(\odot{O_1}\)相交于点\(N\);与圆\(\odot{O_2}\)相交于点\(K\)和点\(M\);与圆\(\odot{O_4}\)相交于点\(J\)和点\(L\);与圆\(\odot{O_3}\)没有交点。我们也可以发现,点\(K\),\(N\)虽然在圆上,但是并不在工作区域的弧线上,所以我们在得到交点后,还要查看此时的弧度\(\theta ^i\)是否满足\(\theta _{Min}^i \le \theta ^i \le \theta _{Max}^i\)。点\(J\)为离射线起点最近的有效交点,是我们所寻找的点。
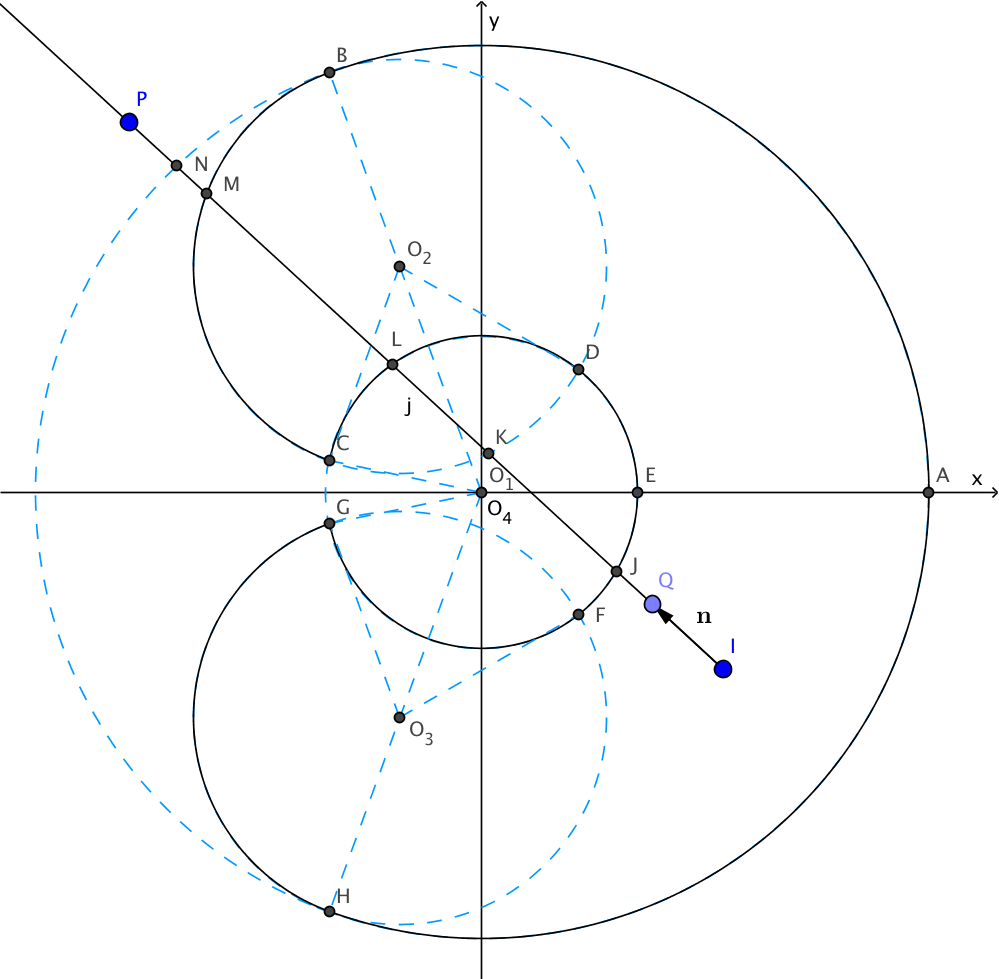 图.5: 射线IP与圆\(\odot{O_1}\)相交于点\(N\),\(\odot{O_2}\)相交于点\(M\)、\(K\),\(\odot{O_4}\)相交于点\(L\)、\(J\)。其中点\(J\)为射线方向的最近工作区域边缘位置。
图.5: 射线IP与圆\(\odot{O_1}\)相交于点\(N\),\(\odot{O_2}\)相交于点\(M\)、\(K\),\(\odot{O_4}\)相交于点\(L\)、\(J\)。其中点\(J\)为射线方向的最近工作区域边缘位置。
算法流程
射线与圆的交点
为了确定与给出射线相交的最近的工作区域边缘位置,我们分别计算出射线与每一个圆的交点集\(\kappa ^i\)。求射线与圆的交点,可以使用传统的参数方程法求交点,另一种方法是使用Akenine-Möller等提出的优化法12,算法流程如下:
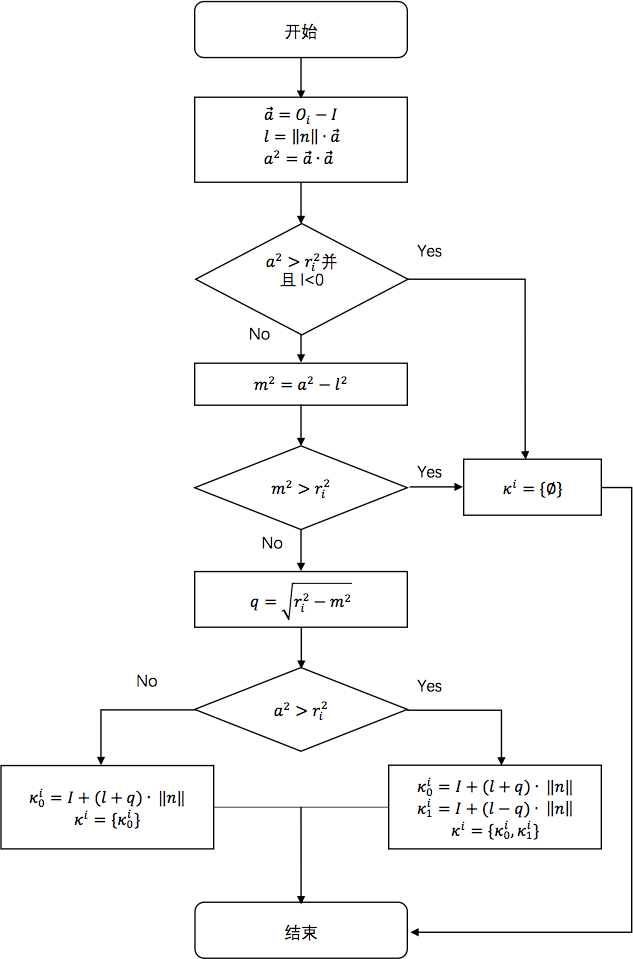
该算法的优点是在计算交点前,先排除掉没有交点的情况,从而减少运算量。
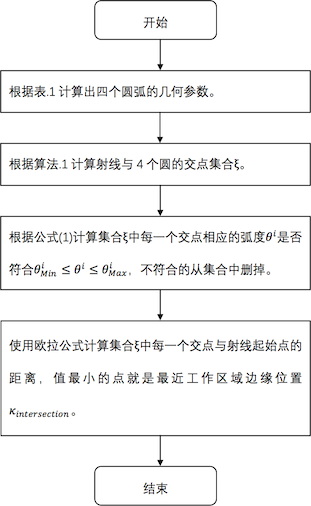
整个算法流程
输入: 1. 射线\(R(u)=I+u \cdot \lVert \mathbf{n} \rVert\) 2. 轴\(J_1\),\(J_2\)各自的臂长\(\alpha_{1}\),\(\alpha_{2}\)以及活动范围$j_{Max}^1 \(,\) j_{Min}^1 \(,\) j_{Max}^2 \(,\) j_{Min}^2$。
输出: 1. 最近的工作区域边缘位置\(\kappa_{intersection}\)。