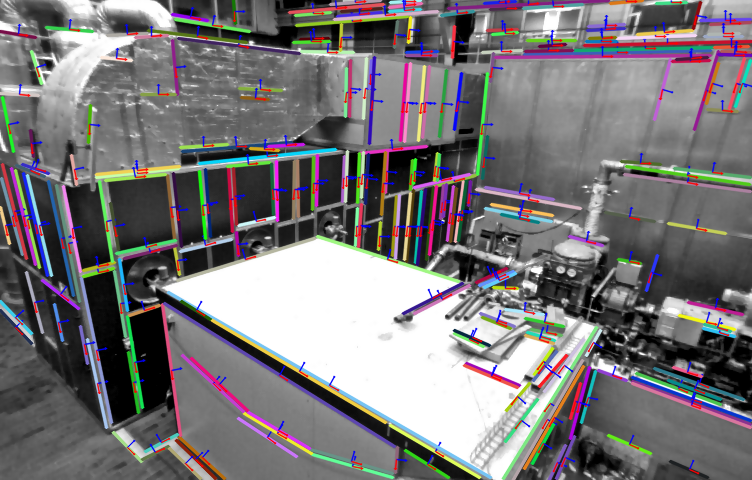
A parallel implementation of EDLine algorithm which based on the
Line Segment Detector module of opencv_contrib.
Compared to the original version, the parallel one results in a almost
50% time reduction on PC with 4 cores CPU.
test
Requirements
The code is tested on Ubuntu 14.04. It requires the following tools
and libraries: CMake, OpenCV 3.4.
Building
1 2 3 4 5 6 7
#!bash git clone https://github.com/HanjieLuo/EDLine_parallel.git cd EDLine_parallel mkdir build cd build cmake .. make
sudo cp /etc/apt/sources.list /etc/apt/sources.list_bak sudo vim /etc/apt/sources.list
替换为:
1 2 3 4 5 6 7 8 9 10
deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal main restricted universe multiverse deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal main main restricted universe multiverse deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main restricted universe multiverse deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-updates main restricted universe multiverse deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-backports main restricted universe multiverse deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-backports main restricted universe multiverse deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main restricted universe multiverse deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-security main restricted universe multiverse # deb https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-proposed main restricted universe multiverse # deb-src https://mirrors.ustc.edu.cn/ubuntu-ports/ focal-proposed main restricted universe multiverse